Defending Against Buffer Overflow Attacks in String-Parsing Arduino Firmware
Warning: a single overflow can crash your Arduino—discover the tested fix that stopped crashes in motorcycle telemetry firmware.
Warning: a single overflow can crash your Arduino—discover the tested fix that stopped crashes in motorcycle telemetry firmware.

Prevent silent system failures by validating sensor input bounds—discover the overlooked edge case that breaks even seasoned embedded code.
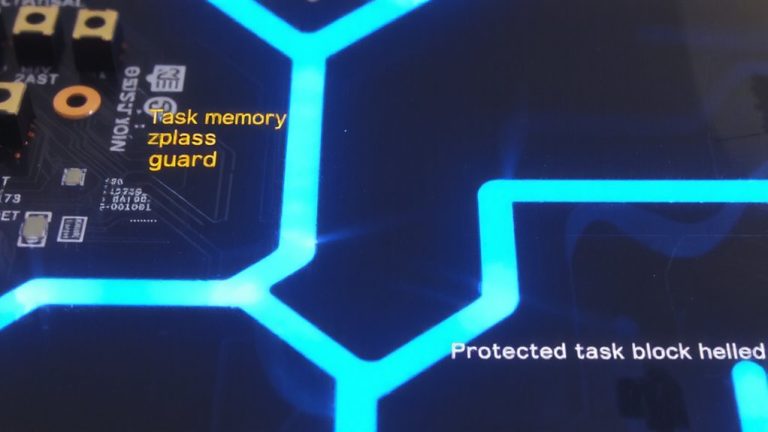
Just when you think stack corruption is undetectable, discover how FreeRTOS canaries and MPU guard regions expose hidden overflows—revealing what’s really crashing your system.

Just imagine slicing Wi-Fi lag in half—what if the secret isn’t upgrading hardware but mastering task affinity on the ESP32’s dual cores?
Discover how dropping idle task percentages reveal hidden ESP32 performance bottlenecks—what happens when your CPU never rests?
Keeping time精准 in FreeRTOS means ditching delay()—discover the critical fix that stops drift dead, but one misstep could crash your entire system.
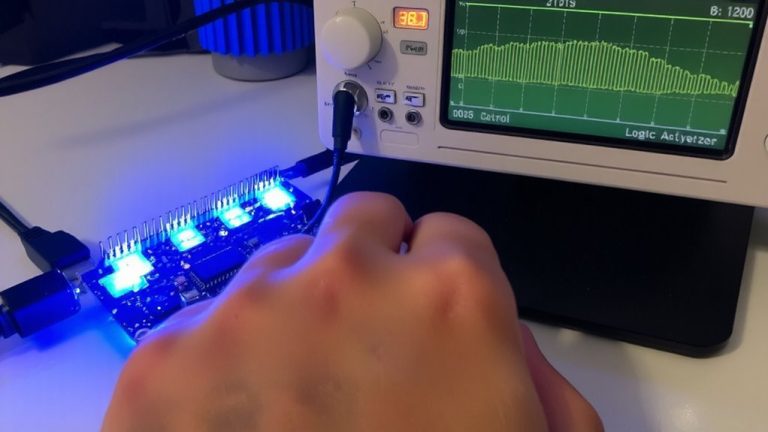
Getting accurate task switch measurements under network stress reveals hidden RTOS delays that could cripple your robot’s timing—what you can’t log, you must probe.
FreeRTOS crashes loom when dynamic allocation drains limited RAM—discover how static task creation tames stack overflow and conserves memory on heap-starved microcontrollers.
Task notifications slash signaling latency on ESP32—discover how replacing queues with a hidden FreeRTOS feature unlocks near-instant task wake-ups.
Just imagine your ESP32 juggling UART, PWM, and sensors flawlessly—see how daemon tasks outperform the Arduino loop.